





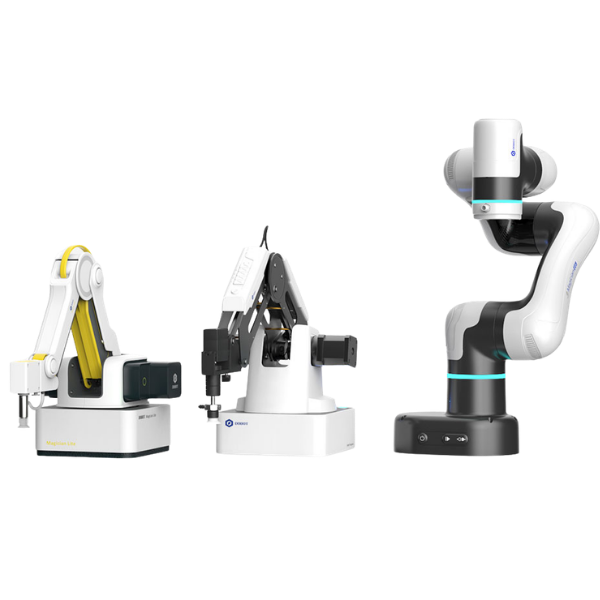


















SO -101
El brazo robótico Open Source de 5 ejes para educación e investigación avanzada.
Desde 364€
Comprar
Tu laboratorio de robótica ahora accesible.
El SO-101 está diseñado para cerrar la brecha entre la teoría y la práctica. Compatible nativamente con ROS 2, MoveIt y Gazebo.

SECOND STAGE
The second stage, powered by a single Merlin Vacuum Engine, delivers Falcon 9's payload to the desired orbit. The second stage engine ignites a few seconds after stage separation, and can be restarted multiple times to place multiple payloads into different orbits.
1 vacuum
397 sec
981 kN / 220,500 lbf
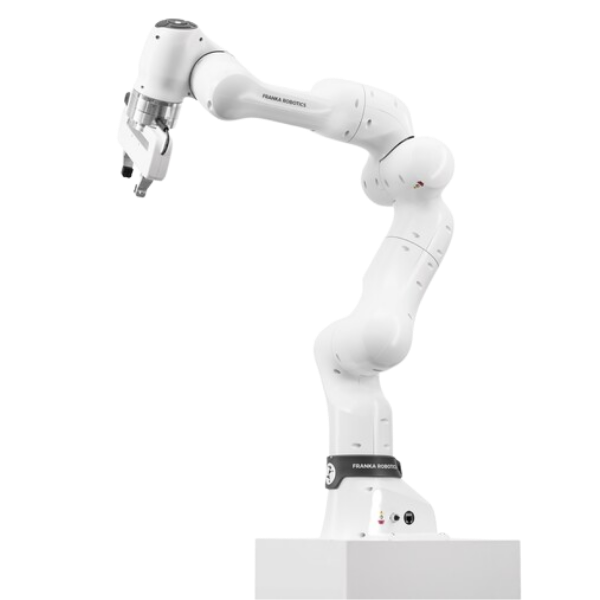
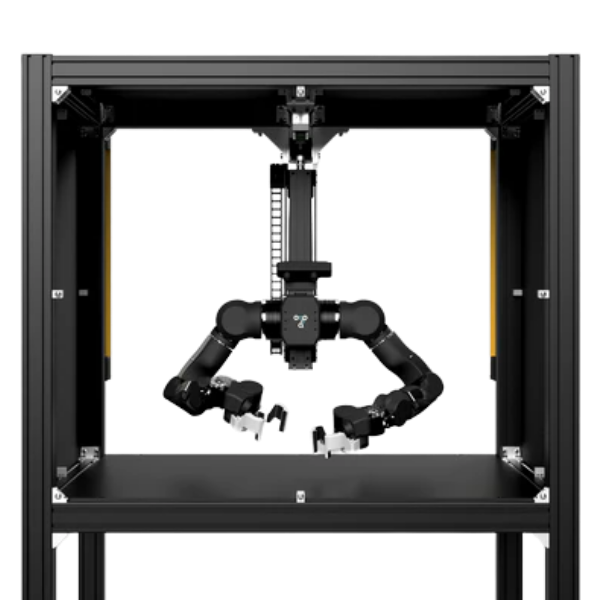
Colaboración líder-seguidor
y recopilación de datos
A través de una arquitectura líder-seguidor, el brazo robótico puede controlarse de forma remota para realizar diversas tareas complejas. El sistema recopila simultáneamente datos de funcionamiento multimodales de alta calidad, lo que proporciona una base para el aprendizaje inteligente posterior.
Ejecución 100% autónoma
Los modelos entrenados se pueden implementar en el brazo robótico con un solo clic, lo que permite la ejecución automática de acciones complejas y mejora significativamente la eficiencia en la recopilación de datos y la capacidad operativa.
Aprendizaje por imitación y entrenamiento de modelos
Con el marco de "machine leanrning" de Hugging Face, se pueden cargar datos y entrenar modelos con un solo clic. Con unos sencillos pasos, las acciones de demostración se pueden convertir en modelos de aprendizaje por imitación que la IA puede procesar, lo que permite al brazo adquirir rápidamente nuevas habilidades.

El proveedor oficial de Wowrobo



Te puede interesar





Preguntas frecuentes
Todo lo que necesitas saber sobre el brazo robótico SO-101: montaje, control, compatibilidad y mantenimiento.
¿Para qué está pensado el SO-101?
Para educación, investigación y prototipado: control, cinemática, visión, teleoperación y pruebas de manipulación ligera. El enfoque open-source facilita personalizar software y accesorios.
¿Qué incluye el kit y qué necesito aparte?
Normalmente incluye estructura, actuadores, cableado básico y documentación. Recomendado aparte:
- Fuente de alimentación compatible con el kit
- Controlador/placa (según tu configuración)
- PC para programar y/o ejecutar la interfaz
- Herramientas básicas de montaje
¿Cuánto tarda el montaje?
Entre 45 y 120 minutos según experiencia. Recomendamos seguir el manual paso a paso y realizar una calibración inicial.
¿Cómo se controla? ¿Puedo usar ROS / Python?
Sí. Habitualmente con scripts en Python y, si tu stack lo permite, integración con ROS/ROS2 para planificación y teleoperación. La compatibilidad exacta depende del controlador y firmware que uses.
¿Cuál es la carga útil recomendada?
Ideal para objetos pequeños. La carga real depende del alcance, velocidad y herramienta final (pinza/ventosa/cámara). Trabaja con márgenes y movimientos suaves para alargar la vida útil.
¿Qué mantenimiento requiere?
- Revisión de tornillería y cableado cada 20–40 horas de uso
- Calibración si detectas desviaciones
- Limpieza de polvo y verificación de conectores
¿Puedo cambiar la pinza o añadir accesorios?
Sí, es una de las ventajas del open-source. Accesorios habituales:
- Pinza personalizada / ventosa
- Cámara para visión
- Soportes para sensores
- Piezas impresas en 3D
¿Es seguro para uso en aula?
Con buenas prácticas, sí: limita velocidad/aceleración, define zona de trabajo, usa paro de emergencia si tu controlador lo soporta y supervisa durante las pruebas.
Evolucionamos la IA para el mundo físico.
Distribuidor oficial de robots de última generación.
CUSTOMER CARE
LEGAL
CONECTA
Copyright 2026. Bravo Robots. Todos los derechos reservados.